
About
I am a Tech Lead at Nuro working on mapping and localization for autonomous vehicles. I am interested in machine learning, state estimation, and writing good software for robotics. Checkout our latest work in using widely available aerial data for ML-based localization for autonomous vehicle in ICRA 2025.
Previously I worked on Perception at Phiar, a startup focusing on combining augmented reality, road understanding, and in-car navigation. Phiar was acquired by Google in 2022.
I graduated with a Master degree in Robotics at Robotics Institute, Carnegie Mellon University in 2019. I worked with Prof. Michael Kaess in the Robot Perception Lab.
Publications
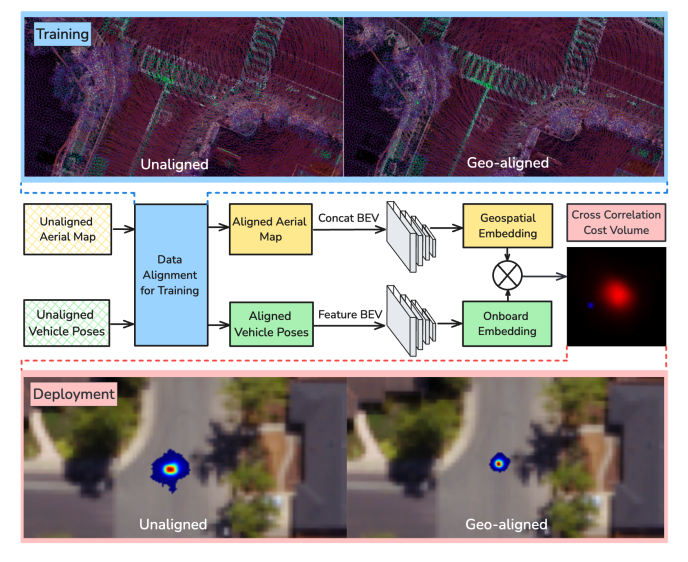 |
Evaluating Global Geo-alignment for Precision Learned Autonomous Vehicle Localization using Aerial Data Yi Yang, Xuran Zhao, H. Charles Zhao, Shumin Yuan, Samuel M. Bateman, Tiffany A. Huang, Chris Beall, Will Maddern International Conference on Robotics and Automation, ICRA 2025 [PDF] |
 |
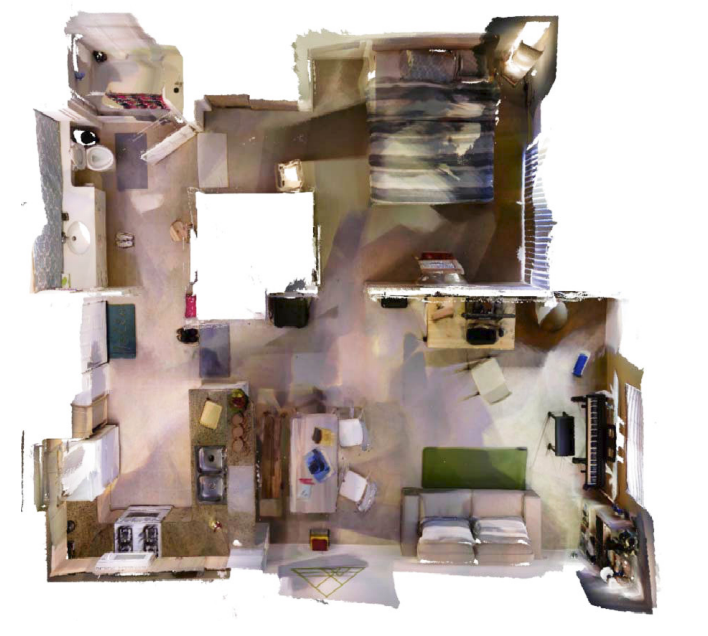
Surfel-Based Dense RGB-D Reconstruction with Global and Local Consistency Yi Yang, Wei Dong, Michael Kaess International Conference on Robotics and Automation, ICRA 2019 [PDF] |
 |
GPU Accelerated Robust Scene Reconstruction Wei Dong, Jaesik Park, Yi Yang, Michael Kaess International Conference on Intelligent Robots and Systems, IROS 2019 [PDF] |
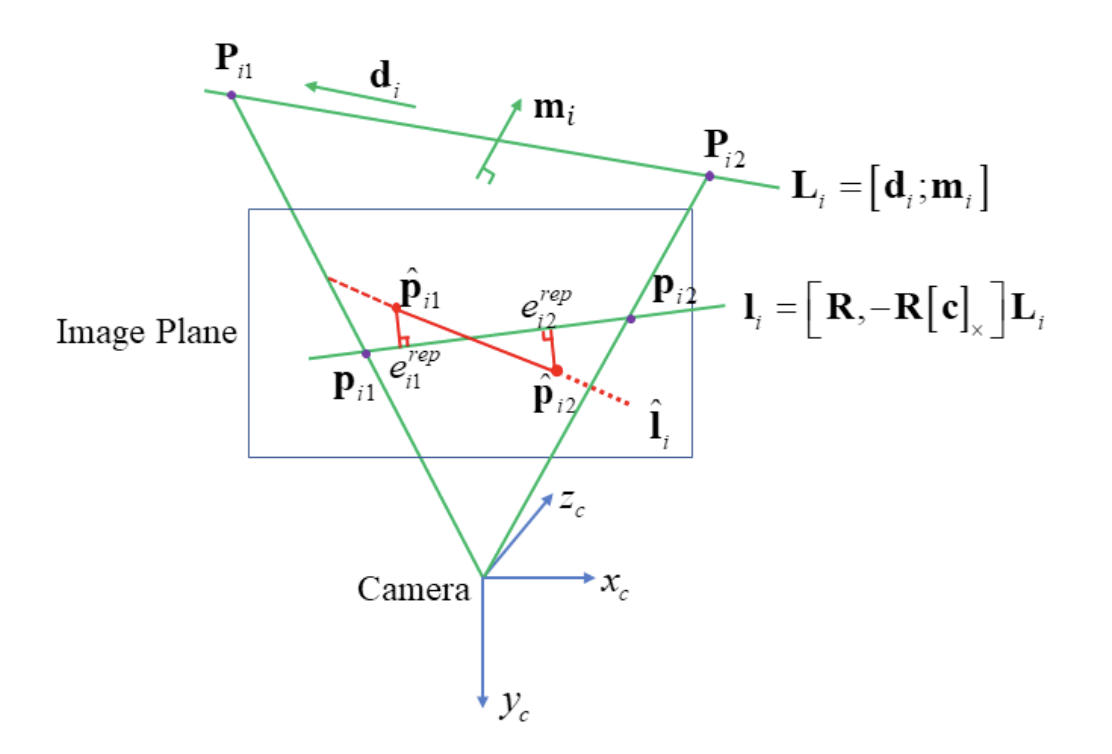 |
A Robust and Efficient Algorithm for the PnL Problem Using Algebraic Distance to Approximate the Reprojection Distance Lipu Zhou, Yi Yang, Montiel Abello, Michael Kaess AAAI Conference on Artificial Intelligence, AAAI 2019 [PDF] |
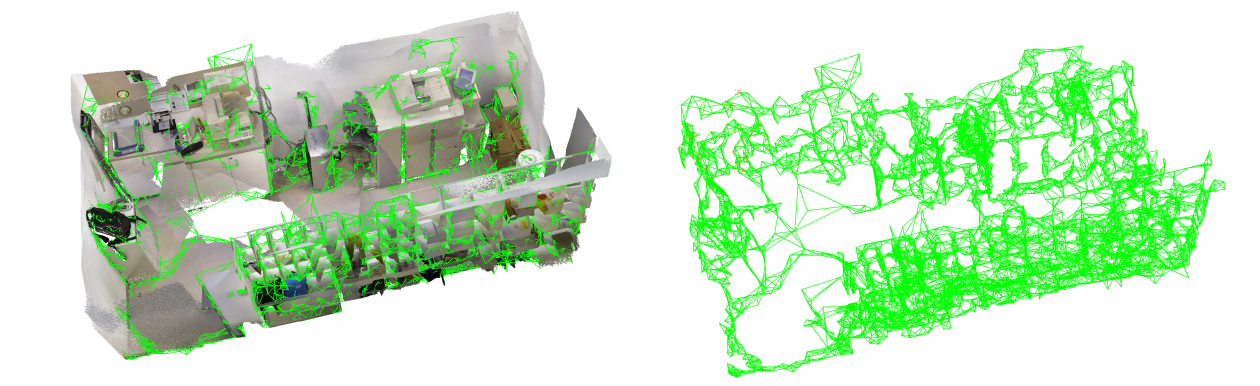 |
Surfel-based RGB-D Reconstruction and SLAM with Global and Local Consistency Yi Yang Master Thesis, Carnegie Mellon University, CMU-RI-TR-19-45, 2019 [PDF] |